Unitree H2
The Unitree H2 is a full-size, bionic humanoid robot built for natural, expressive whole-body motion and real-world task execution. With 31 degrees of freedom, high-torque joints, and a high-performance onboard AI compute platform, the H2 targets research, embodied-AI development, human–robot interaction, and advanced demonstration scenarios.
Expressive Whole-Body Motion
The H2 features 31 degrees of freedom, including 6-DOF legs, 7-DOF arms, a 3-DOF waist, and a 2-DOF head. Combined with joint torques up to 360 N·m, this kinematic configuration enables fluid, human-like movement — walking, balancing, gesturing, and dynamic full-body actions.
Onboard Intelligence
A high-performance AI compute platform rated at up to 2070 TOPS supports onboard perception, planning, and multimodal model inference. Paired with a binocular vision system and joint-level sensing, the H2 can perceive its environment and execute perception-driven behaviours in real time.
Practical Payload and Endurance
The H2 carries a 7 kg continuous payload, with short-duration capacity up to 21 kg, supported by a quick-release smart battery for fast swaps during extended operation.
Open Control and Developer-Friendly Design
The H2 exposes fully open, low-latency control interfaces over Unitree’s unitree_sdk2 (C++),
unitree_sdk2_python (Python), and unitree_ros2 packages, communicating via DDS. It is suitable for:
Humanoid locomotion and whole-body control research
Embodied AI and reinforcement learning
Human–robot interaction experiments
Manipulation with optional dexterous hands
Note
For SDK setup, network configuration, and example commands, see the SDK Development section. The official developer reference is maintained by Unitree at the H2 Developer Guide.
Specifications
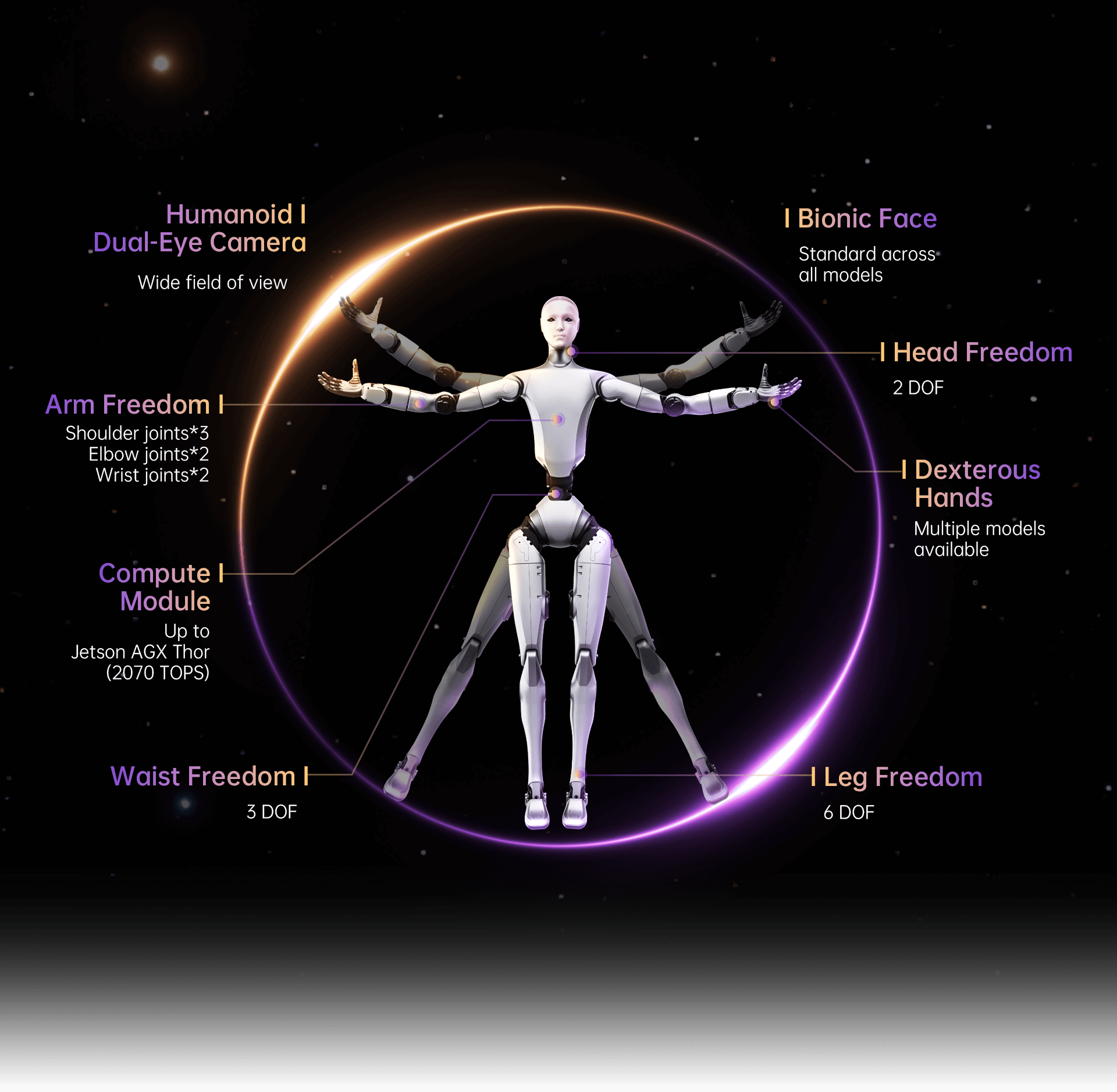
Official Unitree H2 parameter diagram
Physical & Mechanical
Parameter |
Specification |
|---|---|
Height (standing) |
~180–182 cm |
Weight (with battery) |
~70 kg |
Total Degrees of Freedom |
31 |
Single Leg DOF |
6 |
Single Arm DOF |
7 |
Waist DOF |
3 |
Head DOF |
2 |
Peak Joint Torque |
Up to 360 N·m |
Performance
Parameter |
Specification |
|---|---|
Walking Speed |
Under 2 m/s |
Payload (continuous) |
7 kg |
Payload (short duration) |
Up to 21 kg |
Power
Parameter |
Specification |
|---|---|
Battery |
Quick-release smart battery |
Runtime |
~3 hours (configuration dependent) |
Hot Swap |
Quick-release for fast exchange |
Sensing & Compute
Parameter |
Specification |
|---|---|
AI Compute |
Up to 2070 TOPS |
Vision |
Humanoid binocular camera (wide FOV) |
Proprioception |
IMU + joint-level sensing |
Tactile (optional) |
Via dexterous hands |
Warning
Safety Notice: The H2 is a full-size, high-power humanoid capable of forceful, dynamic motion. Maintain adequate clearance during operation, keep the emergency stop accessible, and never allow untrained personnel to operate the robot.
Civilian Use Only: This product is intended exclusively for lawful civilian applications. Hazardous modifications and deployment in dangerous contexts are strictly prohibited.
Note
Specification Source: Values summarised here are drawn from Unitree’s published material and may vary by model, firmware version, configuration, and operating conditions. Some figures (e.g. exact battery capacity) have not been officially disclosed. Always cross-reference the official Unitree H2 Developer Guide before development or deployment.