Hardware
Component Overview
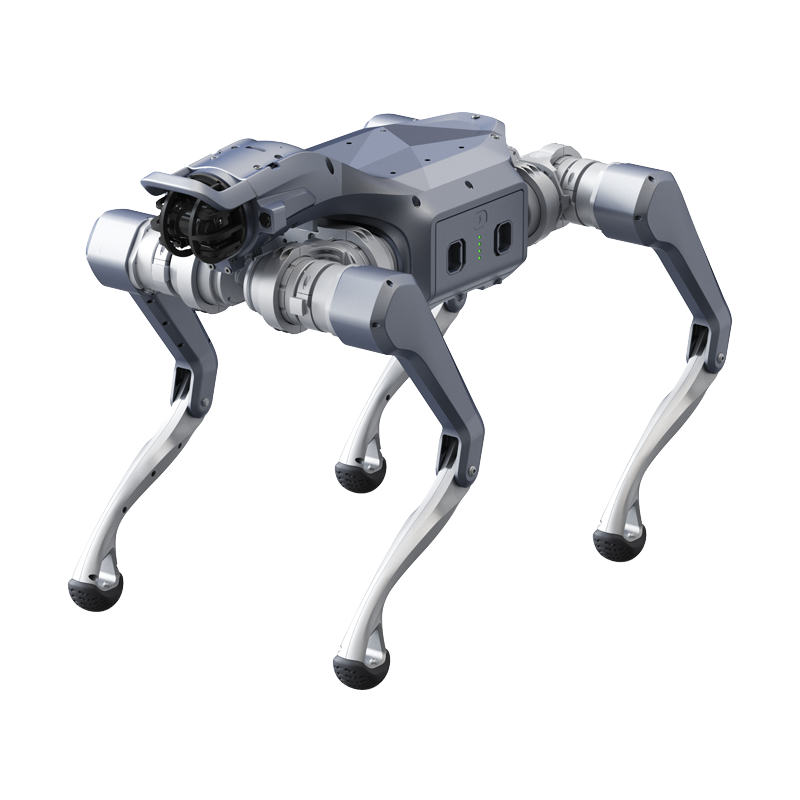
The Unitree A2 is a four-legged industrial robot composed of a sealed central body and four identical legs. Each leg provides three degrees of freedom — hip abduction/adduction, hip flexion/extension, and knee flexion — for a total of twelve actuated joints. The legs use high-torque electric joint actuators with integrated reduction and dual-encoder feedback for precise, dynamic locomotion across rough terrain.
The body houses the onboard compute, dual hot-swappable batteries, the IMU, and the perception payload (LiDAR and camera). External panels are sealed to IP56, while internal compartments reach IP67, allowing the robot to operate in dust, rain, and extreme temperatures.
Degrees of Freedom
Category |
Specification |
|---|---|
Total DOF |
12 |
Per Leg DOF |
3 (Hip Roll, Hip Pitch, Knee) |
Legs |
4 |
Joint Actuators
The A2 uses Unitree’s self-developed electric joint actuators, engineered for high torque density, thermal robustness, and precise closed-loop control. Each actuator integrates dual encoders, providing high-resolution position and velocity feedback required for dynamic gaits, balance recovery, and accurate state estimation.
Parameter |
Specification |
|---|---|
Actuator Type |
High-performance electric (PMSM) |
Peak Joint Torque |
Up to 180 N·m |
Feedback |
Dual encoder (position + velocity) |
Count |
12 (3 × 4 legs) |
Note
Joint ordering, limits, and reference frames used by the control SDK are defined in the official A2 SDK Development Guide. Always confirm joint indices against the SDK header definitions before sending low-level commands.
Perception
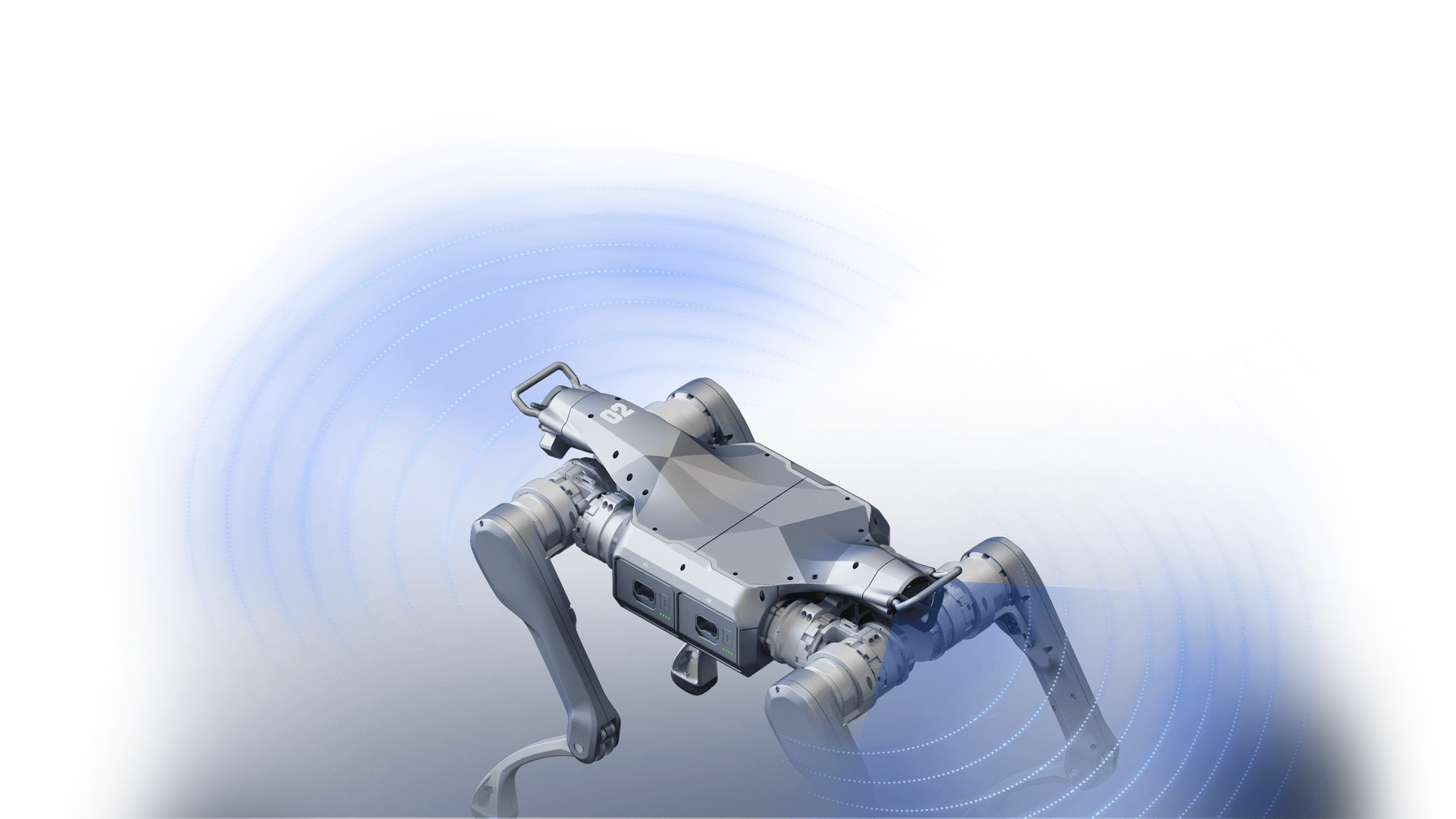
Dual LiDAR providing 360° spatial coverage
LiDAR
The A2 integrates dual industrial LiDAR units — one forward-facing and one rear-facing — providing combined 360° horizontal coverage. This configuration supports real-time point-cloud generation for SLAM, mapping, obstacle detection, and autonomous navigation in unstructured environments.
Camera
An HD camera with an integrated front LED light delivers visual perception for teleoperation, inspection imaging, and low-light navigation. The illuminator enables operation in dark indoor areas, tunnels, and night patrols.
Proprioception
An onboard IMU combined with the per-joint dual encoders provides the proprioceptive sensing required for balance, contact estimation, and stable locomotion control.
Onboard Computer
The A2 ships with an embedded octa-core CPU for motion control and standard autonomy workloads. For perception-heavy or AI inference tasks, an optional Intel Core i7 computing module can be fitted to provide additional processing headroom.
Parameter |
Specification |
|---|---|
Base Compute |
Embedded octa-core CPU |
Optional Compute |
Intel Core i7 module |
Networking |
Gigabit Ethernet, USB-C, Wi-Fi 6, Bluetooth 5.2 |
Optional Networking |
4G LTE, GPS |
Important
For security reasons, change any default login credentials after first access and follow proper shutdown procedures before performing hardware or software modifications.
Power System
The A2 is powered by two 9,000 mAh batteries that support hot swapping, allowing one pack to be replaced while the other sustains the robot. This enables continuous, 24/7 operation in inspection and security deployments without a full power-down cycle.
Parameter |
Specification |
|---|---|
Battery Configuration |
Dual 9,000 mAh packs |
Hot Swap |
Supported |
Runtime (unloaded) |
~5 hours |
Runtime (full load) |
~3 hours |
Warning
Always verify that each battery is fully latched before operation. If the A2 will be stored for an extended period, remove the battery packs. Handle batteries according to lithium-battery safety guidelines.